Tools needed
(Note if you don't have some of the following or know how to use them
check with the list someone more than likely will be willing to give
you a hand. Also always wear safety protection.)
|
Screw drivers
|
To disassemble and reassemble
the RC car. Mine just required a medium philips and a flat blade to pop
some clips open.
|
Wire stripper / cutter
|
To cut and strip the RJ45 cable
|
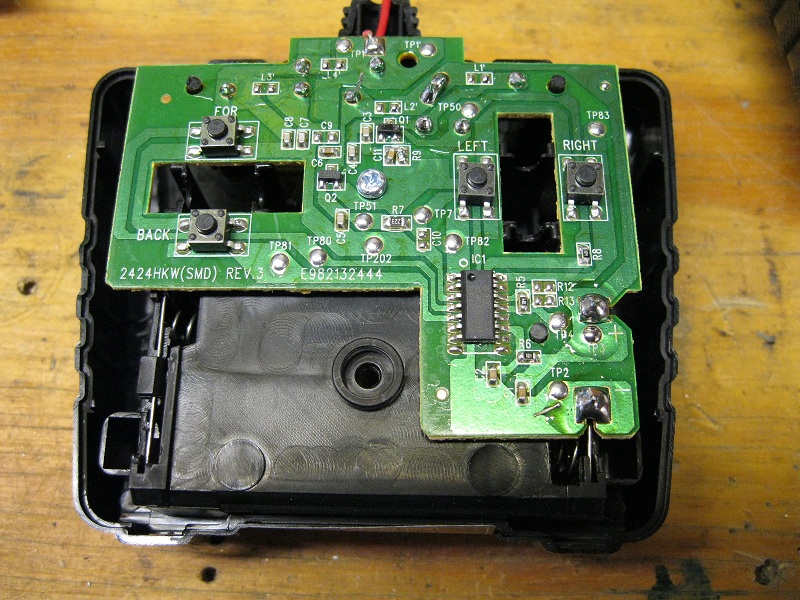
Soldering iron / solder
|
To attach the RJ45 cable to the
RC car PCB
|
Hot glue gun
|
Used to reinforce the wire
connections where they meet the PCB in the RC car
|
Dremal with fiberglass cut off
wheels
|
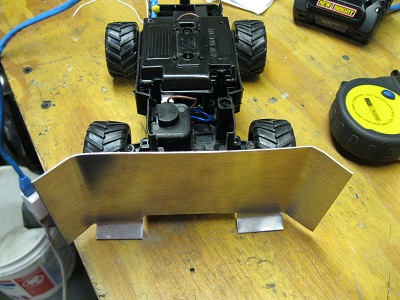
To modify the body of the RC
car. (Also known as the poor mans universal milling machine. Very
useful to have)
|
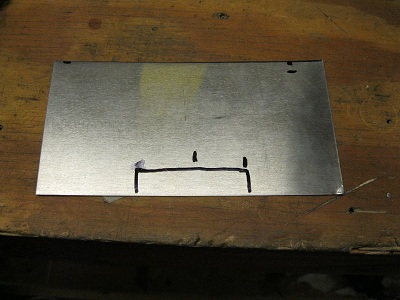
Tin snips
|
To cut the aluminum sheet
|
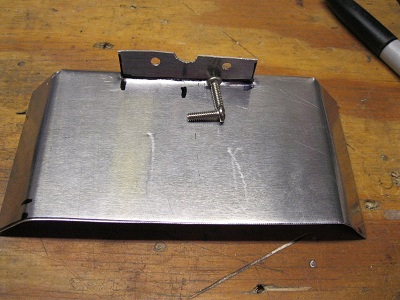
Drill and bits
|
Hand or electric will work.
Needed to put mounting holes in the aluminum sheet and holes in the RC
car for the zip tie to secure the RJ45 cable
|
Sandpaper / file
|
To smooth out any sharp edges
left on the aluminum.
|